Object Normal To World Normal
왜 노말은 월드스페이스로 변형할때 Inverse Transpose를 곱해야 할까?
유니티에서 버텍스 셰이더를 구현하다 보면 인풋으로 들어온 (오브젝트 스페이스)노말은 Inverse Transpose 행렬을 곱하여 World Space Normal로 변환하는 연산을 수행하는 걸 확인할 수 있다.
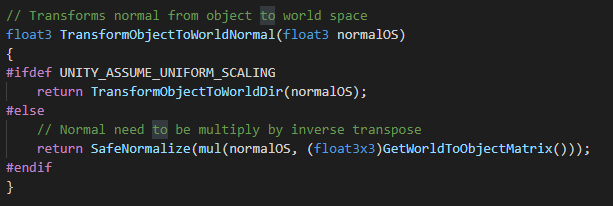
mul(normalOS, (float3x3)GetWorldToObjectMatrix()));
라인을 해석하면
-
GetWorldToObjectMatrix는 UNITY_MATRIX_I_M(Object->Model 행렬의 역행렬) 값이다.
-
mul 함수 첫번째 인자로 벡터가 들어간 경우, 두번째 인자에 들어간 행렬은 Transpose되어 곱연산이 수행된다.
즉 Object Space 노말값에 Object To World 행렬의 Inverse Transpose를 곱하는 연산을 의미한다.(주석으로도 써져 있음)
오브젝트의 노말은 월드 좌표계로 변환할때 왜 그냥 ObjectToWorld 행렬을 곱하지 않는 걸까?
이를 이해하기 위해서는 수학적인 정리가 다소 필요해 적어둔다.
우선 노말 좌표는 Tangent Space에 대한 이해를 필요로 한다. 오브젝트 노말은 모델의 버텍스 좌표와는 다소 다른 좌표계 상에서 정의하며, 이 좌표계를 Tangent Space라고 부른다. 이 개념을 이해했다는 가정 하에 다음 수식으로 넘어간다.
1
오브젝트 표면에 접하는 Tangent Space 위에 어떤 벡터 v(t)가 존재하고, 노말 벡터 v(n)에 대해 두 벡터는 직교하므로 두 벡터를 내적하면 다음과 같은 정의가 성립한다.

또한 위 내적 공식은 정규직교기저 정의에 의해

가 성립한다.
2
탄젠트 스페이스는 모델(=오브젝트)의 표면에 접해 있고, 따라서 탄젠트 벡터를 월드 좌표로 변환할때 Model To World Matrix 연산을 그대로 적용받는다.
3
탄젠트 스페이스 벡터를 월드 좌표로 변환하는 행렬을 M(B)라고 정의하면 1에서 이야기한 내적 공식은 다음과 같이 변형할 수 있다.

탄젠트 벡터 v(t)를 M(B)만큼 변형했을때 노말 벡터 v(n)은 M(A)만큼 변형되어야 한다는 의미.
따라서 M(A)가 우리가 구하는 답(탄젠트 공간의 노말 벡터를 월드 공간의 노말 벡터로 변형하는 행렬) 이다.
4
정규직교기저 정의에 의해 3의 내적 공식 역시 다음과 같이 변형 가능하다.



그런데 1에서

가 성립했으므로 , 두 곱연산 사이에 끼어있는 transpose(M(A))*M(B)에 대해

가 성립한다.


따라서 탄젠트 공간의 노말 벡터를 월드 공간의 노말 벡터로 변형하기 위해서는 Model To World Matrix의 Inverse Transpose를 곱해야 한다.
출처 StackOverflow : Why transforming normals with the transpose of the inverse of the modelview matrix?
